机
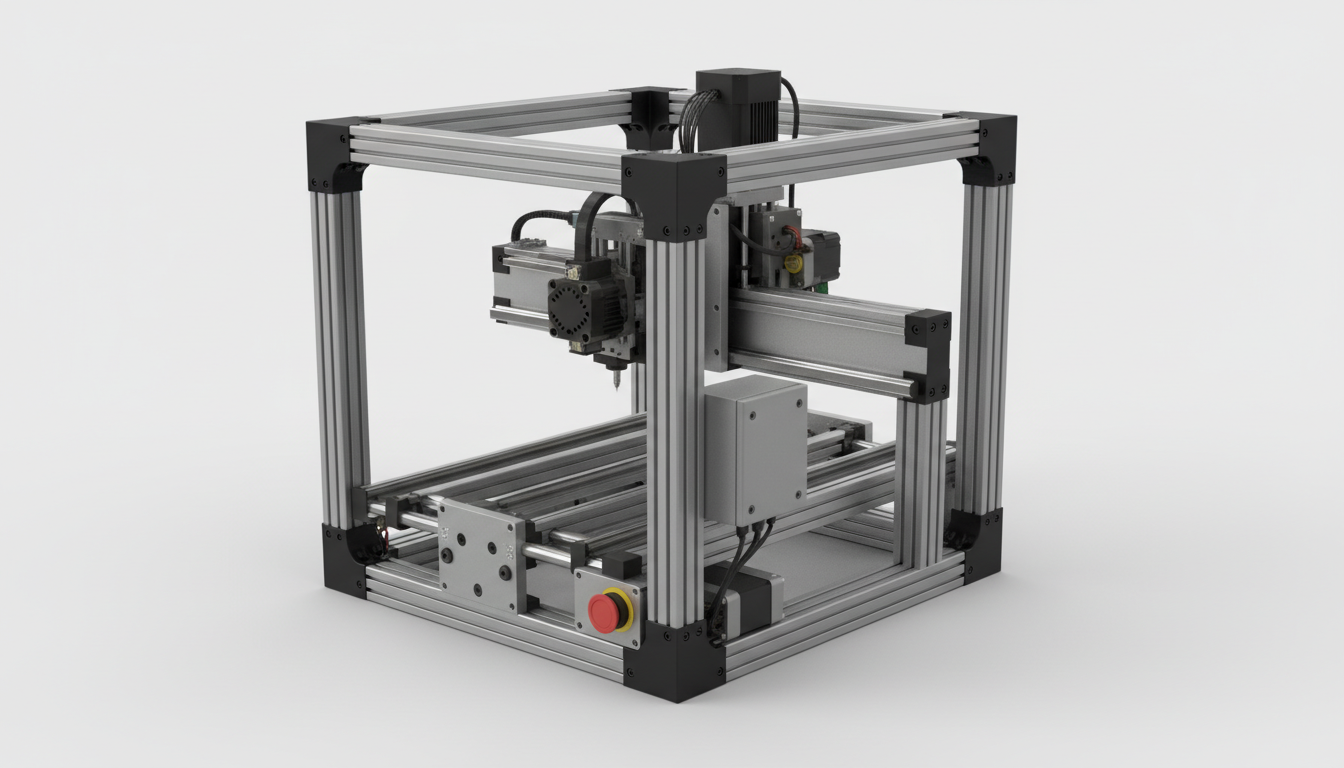
整机参数快览
当前资料中最关键的尺寸、精度与控制参数
整机尺寸
600 × 600 × 600 mm
目标精度
0.05 mm
传动方案
SFU1605 + HGR20
资料整理完成度
关键参数已覆盖